|
Российская Академия Наук |
|
|
Лаборатория МЕХАНИКИ, НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ
Заведующий лабораторией – д.ф.-м.н., проф. Ю.Н. Челноков
Состав
лаборатории:
2 доктора и 3 кандидата наук; 1 научный сотрудник; 1 аспирант
|
|
|
|
|
|
|
д.ф.-м.н. |
д.т.н. |
к.ф.-м.н. |
к.т.н. Молоденков А.В. |
к.ф.-м.н. Бирюков В.Г. |





Основные направления и результаты научных исследований
Основные направления и результаты научных исследований
1. Кватернионные и бикватернионные модели и методы механики твердого тела, систем твердых тел и роботов-манипуляторов
2. Инерциальная ориентация, навигация и нелинейное инерциальное управление движением объектов на бесплатформенных принципах
3. Оптимальное управление угловым и орбитальным движениями космических аппаратов с использованием кватернионных моделей астродинамики
4. Методы синтеза многосвязных систем автоматического управления по критериям точности и робастной устойчивости
5. Алгоритмическое обеспечение систем навигации и управления движением объектов различного назначения
|
|
|
|
В рамках данных направлений:
-
Разработаны новые кватернионные и бикватернионные модели и методы механики твердого тела и их систем, даны их приложения к исследованию движения твердого тела и гироскопических систем и установлению свойств их движения в нелинейной постановке
-
Получено обобщение теоремы Гамильтона-Ишлинского о телесном угле на неголономное пространственное движение твердого тела, имеющее важные приложения в инерциальной навигации и управлении движением
-
Предложен кватернионный метод регуляризации дифференциальных уравнений движения небесных и космических тел, имеющий ряд качественных преимуществ перед классическими регуляризациями Эйлера-Леви-Чивита и Кустаанхеймо-Штифеля; получены новые кватернионные регулярные дифференциальные уравнения возмущенной пространственной задачи двух тел и возмущенной пространственной ограниченной задачи трех тел
-
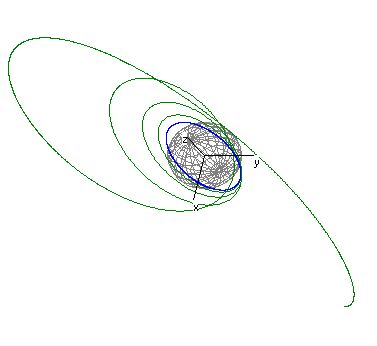
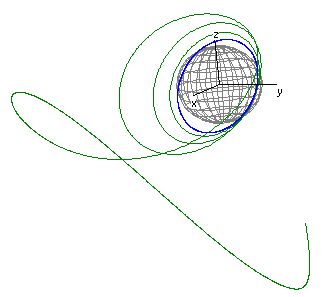
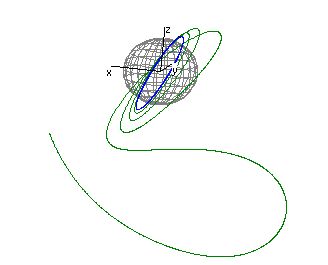
Разработаны новые регулярные кватернионные модели механики космического полета, с их помощью решен ряд актуальных нелинейных пространственных задач оптимального управления траекторным движением космических аппаратов
-
Предложена новая концепция теории устойчивости и управления движением твердого тела, основанная на фундаментальных теоремах теоретической механики – теоремах Эйлера-Даламбера и Шаля и новых дифференциальных уравнениях возмущенного движения
-
Разработаны методы аналитического построения нелинейных управлений вращательным (угловым) движением твердого тела и космического аппарата (КА), гарантирующих асимптотическую устойчивость в большом или в целом любого выбранного программного углового движения и желаемую динамику управляемого углового движения твердого тела и космического аппарата, построены алгоритмы такого управления
-
Построены новые кватернионные и бикватернионные уравнения и алгоритмы пространственной инерциальной навигации, в том числе регулярные кватернионные уравнения космической инерциальной навигации, а также новые уравнения и алгоритмы функционирования бесплатформенных инерциальных навигационных систем, реализованные в современных системах навигации на волоконно-оптических и лазерных гироскопах
-
Предложен новый бикватернионный метод решения прямых задач кинематики роботов-манипуляторов, а также новый метод решения обратных задач кинематики роботов-манипуляторов, использующий бикватернионную теорию кинематического управления движением твердого тела
-
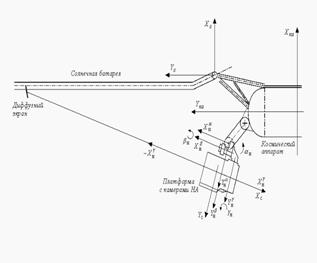
Разработаны модели и алгоритмы управления движением уникального орбитального платформенного комплекса «Манипулятор – трехосная гиростабилизированная платформа» космического проекта «Марс-94»
-
Предложены новые классы аналитических решений в задачах оптимальной переориентации твёрдого тела (КА) для различных функционалов качества переходных процессов
-
Получены аналитические решения задач оптимальных разворотов КА снабжённых импульсными двигателями ориентации, реализующие двухимпульсные схемы управления; данные решения справедливы при произвольных граничных условиях по угловому положению и угловой скорости КА
-
Исследованы особые режимы управления в задачах оптимальных разворотов сферически-симметричного, осесимметричного и произвольного твёрдого тела (КА) при произвольных граничных условиях задач
-
Получено аналитическое решение модифицированной задачи оптимального разворота КА в классе обобщенных конических движений, которое может рассматриваться как приближенное решение классической задачи оптимального разворота КА при произвольных граничных условиях и произвольной динамической конфигурации КА
-
Разработаны аналитические методы синтеза регуляторов многомерных систем управления с учетом требований точности при постоянных или случайных возмущениях и требований грубости (робастной устойчивости) замкнутой системы к возможным неопределенностям модели объекта
-
Даны оценки предельной статической точности дискретных систем с регуляторами по состоянию и по измеряемому выходу
-
Предложен новый класс дискретных регуляторов с наблюдателями минимального порядка и максимального быстродействия, основанный на приведении объекта управления к канонической форме
-
Дано новое решение регулярных и сингулярных задач Н∞-оптимизации с использованием наблюдателей полного порядка и минимальной размерности, основанное на принципе разделения
Фундаментальные НИР, выполненные в лаборатории по программам Отделения энергетики, машиностроения, механики и процессов управления РАН (1996-2015 гг.):
“Кватернионное построение оптимальных управлений и траекторий космических аппаратов” (ГР № 01.960.0 04385, 1996-1997гг.),
“Анализ и синтез законов управления движением в ньютоновском гравитационном поле на основе кватернионных методов механики и методов пространства состояний” (ГР № 01.9.80 0 02098, 1998 - 2000 гг.),
“Разработка теории управления движением на основе кватернионных и бикватернионных методов механики твердого тела и методов пространства состояний и ее приложение к управлению движением космических аппаратов и роботов-манипуляторов” (ГР № 01.2.00 102218, 2001-2003 гг.),
“Разработка кватернионных и бикватернионных моделей и методов механики твердого тела, методов пространства состояний в задачах динамики и управления движением” (ГР № 0120.0 403260, 2004-2006 гг.),
“Кватернионные модели и методы динамики, навигации и управления движением” (ГР № 01.2.007 02554, 2007-2009 гг.),
“Кватернионные модели и методы в задачах механики, навигации и
управления движением” (ГР № 01201000279, 2010-
2012 гг.),
“Исследование проблем механики, навигации и управления движением с использованием кватернионных и бикватернионных моделей и методов пространства состояний” (ГР № 01201352213, 2013-2015 гг.)
Гранты, проекты:
Проект в области авиационной и
ракетно-космической техники:
“Разработка теории и алгоритмов инерциальной навигации
и управления движением летательных аппаратов на основе кватернионов
Гамильтона и бикватернионов Клиффорда” (1993-1995 гг.).
Проект по программе “Государственная поддержка интеграции высшего
образования и фундаментальных наук на 1997-2000 гг.”:
“Поддержка и развитие учебно-научного центра по проблемам
механики Саратовского научно-образовательного комплекса в области
фундаментальных наук”, раздел “Динамика, устойчивость и управление
движением твердого тела”.
Семь
трёхгодичных проектов (1993-2014 гг.), поддержанных Российским фондом
фундаментальных исследований:
“Разработка кватернионных и бикватернионных моделей,
методов и алгоритмов решения задач механики, навигации и управления
движением” (1993-1995 гг., проект № 93-01-17479),
“Кватернионные модели и методы теории управления движением
космических аппаратов” (1996-1998 гг., проект № 96-01-01251),
“Развитие кватернионных моделей и методов механики
космического полета” (1999-2001 гг., проект № 99-01-00192),
“Кватернионные модели и методы в пространственных нелинейных
задачах оптимального управления движением космических аппаратов”
(2002–2004 гг., проект № 02-01-00988),
“Кватернионные модели и методы динамики и управления
движением космических аппаратов” (2005–2007 гг., проект № 05-01-00-347),
“Управление движением в космосе с использованием
кватернионов” (2008–2010 гг., проект № 08-01-00-310),
“Исследование проблем механики управляемого движения с
использованием кватернионных и бикватернионных моделей и методов”
(2012–2014 гг., проект № 12-01-00165).
Двухгодичный проект в рамках научной программы “Университеты России –
Фундаментальные исследования”:
“Разработка аналитических и численных методов решения задач
оптимального управления пространственным движением космических
аппаратов, использующих кватернионные переменные”, выполненный
(2000-2001 гг.).
Три
издательских проекта, выполненных при поддержке Российского фонда
фундаментальных исследований:
Издание монографии “Кватернионные и бикватернионные
модели и методы механики твердого тела и их приложения. Геометрия и
кинематика движения” (2005–2006 гг., проект № 05-01-14038-д),
Издание монографии “Кватернионные модели и методы
динамики, навигации и управления движением” (2009-2010 гг., проект №
09-01-07022-д),
Издание монографии “Кватернионные модели и методы
динамики, навигации и управления движением” (2009 г., проект №
09-01-02002-э_д).
Прикладные НИР, выполненные в рамках Государственного космического проекта “Марс-94” (1990-1996 гг.) по заказам Всероссийского НИИ транспортного машиностроения (г. С.-Петербург) и Института космических исследований РАН (г. Москва)
Прикладные исследования по разработке теории, алгоритмов и программно-математического обеспечения функционирования бесплатформенных инерциальных навигационных систем, предназначенных для решения задач ориентации и навигации летательных и других аппаратов в географической и ортодромической системах координат по заказам Конструкторского бюро промышленной автоматики (г. Саратов, 1984-1990 гг.), ООО НПК “Оптолинк” (г. Москва (Зеленоград), 2006-2009 гг.), ОАО «Концерн «Авионика» (г. Москва, 2011 г.), ООО «Аэроспецпроект» (г. Жуковский Московской области, 2012-2013 гг.).
Разработки прикладного характера
-
Математические модели движения уникального космического комплекса, состоящего из трехзвенного манипулятора и трехосной гиростабилизированной платформы в обращенном торсионном кардановом подвесе, установленной на выходном звене манипулятора (главный конструктор комплекса Г.А. Пейсахович); теория и алгоритмы управления движением комплекса, программно-математическое обеспечение для моделирования движения комплекса и отработки законов и алгоритмов управления его движением (Государственный космический проект “Марс-94” (1990-1996 гг.))
|
|
-
Новые высокоэффективные алгоритмы и программы численного решения нелинейных пространственных краевых задач оптимального управления движением космических аппаратов, реализующие достоинства кватернионных моделей астродинамики
-
Математическое и алгоритмическое обеспечение бесплатформенных систем ориентации и навигации движущихся объектов в инерциальной, географической и ортодромической системах координат
|
|
|
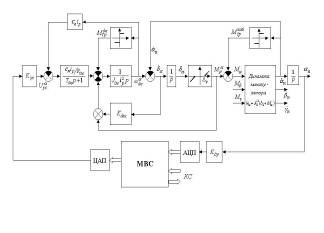
Разработка математического, алгоритмического и
программного обеспечения
бесплатформенной инерциальной навигационной системы (БИНС)
Сотрудниками лаборатории
разработано математическое, алгоритмическое и программное обеспечение
БИНС, предназначенной для высокоточного решения задач инерциальной
ориентации и навигации объекта в инерциальной или географической опорной
системе координат в автономном и корректируемом режимах. Предполагается,
что БИНС имеет в своем составе три акселерометра, измерители проекций
абсолютной угловой скорости объекта, датчики высоты и вертикальной
скорости (в корректируемом режиме) и бортовой вычислитель (БЦВМ).
Разработаны новые высокоточные алгоритмы определения
параметров ориентации объекта в инерциальной и географической системах
координат (параметров Родрига-Гамильтона (Эйлера), углов курса,
рыскания, тангажа и крена); проекций относительной, кажущейся и
гравитационной скоростей, а также географических координат
местоположения объекта (высоты, долготы и широты). Алгоритмы могут
использовать или мгновенную первичную информацию о движении объекта
(проекции векторов абсолютной угловой скорости и кажущегося ускорения
объекта на связанные с ним координатные оси), или интегральную первичную
информацию о движении объекта (приращения интегралов от проекций
векторов абсолютной угловой скорости и кажущегося ускорения объекта).
Для разработки алгоритмов использованы новые уравнения инерциальной
ориентации и навигации, построенные сотрудниками лаборатории, а также
применен новый эффективный математический аппарат, использующий
кватернионы Гамильтона и бикватернионы Клиффорда.
Разработанные алгоритмы ориентации БИНС имеют
методические погрешности, равные 10-8 ÷10-5
град/час, а навигационные алгоритмы имеют в автономном режиме через час
движения методические погрешности, равные 10-5
÷10-3 м/с по скорости, и 10-3
÷4 м по местоположению (по вертикальному каналу
эти погрешности на 1-2 порядка больше) в зависимости от параметров
вращательного (углового) и траекторного (поступательного) движений
объекта и порядка точности используемых алгоритмов.
Рассмотрены основные принципы построения корректируемой
по высоте и вертикальной скорости БИНС, предложены различные подходы к
синтезу алгоритмов коррекции как для непрерывного, так и для дискретного
вариантов. Разработан метод синтеза корректирующей обратной связи (в
непрерывном и дискретном вариантах) с учетом помех в измерительной
информации о высоте и вертикальной скорости с дополнительным требованием
астатизма, необходимого для устранения постоянных составляющих ошибок
вертикального канала. Проведено моделирование работы корректируемой БИНС
с различными вариантами коррекции как без учета помех измерителей
(гироскопов, акселерометров, датчиков высоты и вертикальной скорости),
так и с учетом этих помех.
Ряд разработок по БИНС выполнен по заказам Конструкторского
бюро промышленной автоматики (г. Саратов, 1984-1990 гг.), ООО НПК
“Оптолинк” (г. Москва (Зеленоград), 2006-2009 гг.), ОАО «Концерн «Авионика»
(г. Москва, 2011 г.), ООО «Аэроспецпроект» (г. Жуковский Московской
области, 2012-2013 гг.).
Со списком публикаций сотрудников лаборатории по БИНС можно ознакомиться здесь.
За период 1997-2015 гг. опубликовано свыше 130 научных работ, в том числе более 60 крупных научных статей в журналах «Известия РАН. Механика твердого тела», «Космические исследования», «Известия РАН. Теория и системы управления», «Гироскопия и навигация», «Автоматика и телемеханика».
-
Садомцев Ю.В. Оценивание и фильтрация в задачах управления. Учебное пособие. Саратов: СГТУ, 2015.
-
Садомцев Ю.В. Системы автоматического управления с обратной связью. Анализ и синтез по критериям точности и робастной устойчивости. Lambert Academic Publishing. 2012.
-
Челноков Ю.Н. Кватернионные модели и методы динамики, навигации и управления движением. М.: ФИЗМАТЛИТ, 2011. 560с.
-
Челноков Ю.Н. Кватернионные и бикватернионные модели и методы механики твердого тела и их приложения. М.: ФИЗМАТЛИТ, 2006. 512с.
-
Садомцев Ю.В. Конструирование систем управления с обратной связью по критериям точности и грубости. - Саратов: СГТУ, 2003.- 208с.
-
Челноков Ю.Н. Кватернионные и бикватернионные модели и методы механики твердого тела и их приложения: Геометрия движения // Учебное пособие для студентов мех.-мат.фак. Саратов: Изд-во Сарат. ун-та, 2003. 240с.
-
Челноков Ю.Н. Инерциальная ориентация и навигация движущихся объектов // Учебное пособие для студентов мех.-мат. фак. Саратов: Изд-во Сарат. ун-та, 2002. 64с.
-
Садомцев Ю.В. Основы анализа дискретных систем автоматического управления: Учебное пособие. Саратов: СГТУ, 1998. 94с.
-
Челноков Ю.Н., Челнокова Л.А. Исследование алгоритмов определения ориентации космического аппарата // Учебное пособие для студентов мех.-мат. фак. Саратов, 1997. 36с.
Основные публикации в периодических изданиях (за последние 5 лет): 2015, 2014, 2013, 2012, 2011
-
Молоденков А.В., Сапунков Я.Г. Аналитическое приближенное решение задачи оптимального разворота космического аппарата при произвольных граничных условиях // Известия РАН. Теория и системы управления. 2015. № 3.
-
Молоденков А.В., Сапунков Я.Г. Аналитическое решение задачи оптимального в смысле комбинированного функционала разворота твёрдого тела в классе конических движений // Известия РАН. Механика твёрдого тела. 2015. № 6.
-
Челноков Ю.Н. Кватернионная регуляризация в небесной механике и астродинамике и управление траекторным движением. III // Космические исследования. 2015. Т.53. №5. C.430-446.
-
Molodenkov A.V., Sapunkov Ya.G. Analytical approximate solution of the problem of a spacecraft’s optimal turn with arbitrary boundary conditions// Journal of Computer and Systems Sciences International. 2015. Vol.54. No.3. P.458-465.
-
Нелаева Е.И., Челноков Ю.Н. Решение прямых и обратных задач кинематики роботов-манипуляторов с использованием дуальных матриц и бикватернионов на примере стэнфордского манипулятора. Часть 1. // Мехатроника, автоматизация, управление. 2015. Т.16. №6. С.373-380.
-
Нелаева Е.И., Челноков Ю.Н. Решение прямых и обратных задач кинематики роботов-манипуляторов с использованием дуальных матриц и бикватернионов на примере стэнфордского манипулятора. Часть 2. // Мехатроника, автоматизация, управление. 2015. Т.16. №7. С.456-463.
-
Сапунков Я.Г., Молоденков А.В. Алгоритм оптимального по энергии разворота космического аппарата при произвольных граничных условиях // Мехатроника, автоматизация, управление. 2015. Т.16. №8. С.536-544.
2015, 2014, 2013, 2012, 2011, Книги, Назад к началу раздела
-
Молоденков А.В., Сапунков Я.Г. Аналитическое решение задачи оптимального по быстродействию разворота сферически-симметричного космического аппарата в классе конических движений // Известия РАН. Теория и системы управления. 2014. №2. С.13-24.
-
Molodenkov A.V., Sapunkov Ya.G. Analytical solution of the time-optimal slew problem of a spherically symmetric spacecraft in the class of conical motion // Journal of Computer and Systems Sciences International. 2014. Vol.53. No.2. P.159-171.
-
Депутатова Е.А., Калихман Д.М., Никифоров В.М., Садомцев Ю.В. Прецизионные поворотные стенды нового поколения с инерциальными чувствительными элементами и цифровым управлением // Известия РАН. Теория и системы управления. 2014. №2. С.130-146.
-
Deputatova E.A., Kalikhman D.M., Nikiforov V.M., Sadomtsev Yu.V. New generation precision motion simulators with inertial sensors and digital control // Journal of Computer and Systems Sciences International. 2014. Vol.53. No.2. P.275-290.
-
Челноков Ю.Н. Кватернионная регуляризация в небесной механике и астродинамике и управление траекторным движением. II // Космические исследования. 2014. Т.52. №4. С.322-336.
-
Бирюков В.Г., Челноков Ю.Н. Построение оптимальных законов изменения вектора кинетического момента твердого тела // Известия РАН. Механика твердого тела. 2014. №5. С.3-21.
-
Молоденков А.В., Сапунков Я.Г. Решение задачи оптимального разворота сферически симметричного твердого тела при произвольных граничных условиях в классе обобщенных конических движений // Известия РАН. Механика твердого тела. 2014. №5. С.22-34.
-
Molodenkov A.V., Sapunkov Ya.G. Solutions of the optimal turn problem for a spherically symmetric body under arbitrary boundary conditions in the class of generalized conical motion // Mechanics of Solids. 2014. Vol.49. No.5.
-
Сапунков Я.Г. Оптимальное управление космическим аппаратом с двигателем ограниченной или импульсной тяги и солнечным парусом // Мехатроника, автоматизация, управление. 2014. №4. С.55-61.
-
Chelnokov Yu.N., Pankratov I.A., Sapunkov Y.G. Optimal reorientation of spacecraft orbit // Archives of Control Sciences. 2014. Vol.24(LX). No.2. P.119-128.
-
Сапунков Я.Г., Молоденков А.В. Алгоритм оптимального в смысле комбинированного функционала разворота космического аппарата в классе конических движений // Мехатроника, автоматизация, управление. 2014. №7. С.67-72.
-
Ломовцева Е.И., Челноков Ю.Н. Дуальные матричные и бикватернионные методы решения прямой и обратной задач кинематики роботов-манипуляторов на примере стэнфордского манипулятора. II // Изв. Сарат. ун-та. Нов. сер. Сер. Математика. Механика. Информатика. 2014. Т.14, В.1. С.88-95.
-
Челноков Ю.Н., Переляев С.Е. Новые алгоритмы определения ориентации объекта // Прикладная математика и механика. 2014. Т.78. Вып.6. С.778-789.
2015, 2014, 2013, 2012, 2011, Книги, Назад к началу раздела
-
Молоденков А.В., Сапунков Я.Г. Аналитическое решение задачи оптимального разворота сферически-симметричного космического аппарата в классе конических движений // Известия РАН. Теория и системы управления. 2013. №3. С.167-176.
-
Molodenkov A.V. and Sapunkov Ya.G. Analytical solution of the optimal slew problem of a spherically symmetric spacecraft in the class of conical motion // Journal of Computer and Systems Sciences International. 2013. Vol.52. No.3. P.491-501.
-
Челноков Ю.Н. Бикватернионное решение кинематической задачи управления движением твердого тела и его приложение к решению обратных задач кинематики роботов-манипуляторов // Известия РАН. Механика твердого тела. 2013. №1. С.38-58.
-
Chelnokov Yu.N. Biquaternion solution of the kinematic control problem for the motion of a rigid body and its application to the solution of inverse problems of robot-manipulator kinematics // Mechanics of Solids. 2013. Vol.48. No.1. P.31-46.
-
Алешкин В.В., Плотников П.К., Челноков Ю.Н. Определение конфигурации блока датчиков при асимптотическом оценивании параметров движения // Мехатроника, автоматизация, управление. 2013. №2. С.60–65.
-
Логинов М.Ю., Ткаченко М.Г., Челноков Ю.Н. Аналитическое решение линейных дифференциальных уравнений ошибок БИНС, функционирующей в нормальной географической системе координат, для случая движения вдоль экватора с постоянной скоростью на постоянной высоте // Изв. Сарат. ун-та. Нов. сер. Сер. Математика. Механика. Информатика. 2013. Т.13. В.1. ч.1. С.69-84.
-
Панкратов И.А., Сапунков Я.Г., Челноков Ю.Н. Решение задачи оптимальной переориентации орбиты космического аппарата с использованием кватернионных уравнений ориентации орбитальной системы координат // Изв. Сарат. ун-та. Нов. сер. Сер. Математика. Механика. Информатика. 2013. Т.13. В.1, ч.1. С.84-92.
-
Сапунков Я.Г., Молоденков А.В. Решение задачи оптимального в смысле минимума энергетических затрат разворота космического аппарата в классе конических движений // Вестник Саратовского гос. технич. ун-та. 2013. №2.
-
Сапунков Я.Г., Молоденков А.В. Алгоритм оптимального по быстродействию разворота космического аппарата в классе конических движений // Мехатроника, автоматизация, управление. 2013. №10.
2015, 2014, 2013, 2012, 2011, Книги, Назад к началу раздела
-
Садомцев Ю.В. Решение задач Н∞-оптимизации на основе принципа разделения // Автоматика и телемеханика. 2012. №1. С.62-81.
-
Молоденков А.В., Сапунков Я.Г. Новый класс аналитических решений в задаче оптимального разворота сферически симметричного твердого тела // Известия РАН. Механика твердого тела. 2012. №2. С.16-27.
-
Молоденков А.В., Сапунков Я.Г. Особый режим управления в задаче оптимального разворота произвольного твердого тела (космического аппарата) // Известия РАН. Теория и системы управления. 2012. №2. С.145-152.
-
Molodenkov A.V., Sapunkov Ya.G. A new class of analytic solutions in the optimal turn problem for a spherically symmetric body // Mechanics of Solids. 2012. Vol.47. No.2. P.167-177.
-
Molodenkov A.V., Sapunkov Ya.G. Special control mode in the problem of optimal turn of an arbitrary rigid body (spacecraft) // Journal of Computer and Systems Sciences International. 2012. Vol.51. No2. P.306-314.
2015, 2014, 2013, 2012, 2011, Книги, Назад к началу раздела
-
Челноков Ю.Н., Панкратов И.А. Переориентация круговой орбиты космического аппарата с тремя точками переключения управления // Мехатроника, автоматизация, управление. Управление и автоматика в авиакосмических системах. 2011. №1. С.70-73.
-
Челноков Ю.Н., Панкратов И.А. Аналитическое решение дифференциальных уравнений ориентации круговой орбиты космического аппарата // Изв. Сарат. ун-та. Нов. сер. Сер. Математика. Механика. Информатика. 2011. Т.11. В.1. С.84-89.
-
Челноков Ю.Н., Зелепукина О.В. Построение оптимальных законов изменения вектора кинетического момента динамически симметричного твердого тела // Известия РАН. Механика твердого тела. 2011. №4. С.31-49.
-
Chelnokov Yu.N., Zelepukina O.V. Construction of optimal laws of variation in angular momentum vector of a dynamically symmetric rigid body // Mechanics of Solids. 2011. Vol.46, No.4. P.519-533.
-
Челноков Ю.Н. Кватернионная регуляризация в астродинамике и управление траекторным движением // Вестник Нижегородского ун-та им. Н.И. Лобачевского. 2011. №4(5). C.2583-2585.
-
Молоденков А.В., Сапунков Я.Г Особые режимы управления в задаче оптимального разворота космического аппарата и их приложения // Вестник Нижегородского ун-та им. Н.И. Лобачевского. 2011. №4(2). С.237-238.
-
Сапунков Я.Г, Молоденков А.В. Исследование особого режима управления в задаче оптимального разворота произвольного твердого тела (космического аппарата) // Мехатроника, автоматизация, управление. 2011. №4. С.67-70.
-
Депутатова Е.А., Калихман Д.М., Полушкин А.В., Садомцев Ю.В. Цифровая стабилизация движений прецизионных управляемых оснований с инерциальными чувствительными элементами. Часть 1. Применение поплавкового измерителя угловой скорости. // Известия РАН. Теория и системы управления. 2011. №1. С.120-132.
-
Deputatova E.A., Kalikhman D.M., Polushkin A.V., Sadomtsev Yu.V. Digital stabilization of motion of precision controlled base platforms with inertial sensitive elements. I. Application of float angular velocity sensor // Journal of Computer and Systems Sciences International. 2011. Vol.50. No.1. P.117-129.
-
Депутатова Е.А., Калихман Д.М., Полушкин А.В., Садомцев Ю.В. Цифровая стабилизация движений прецизионных управляемых оснований с инерциальными чувствительными элементами. Часть 2. Применение поплавкового измерителя угловой скорости и маятниковых акселерометров. // Известия РАН. Теория и системы управления. 2011. №2. С.131-146.
-
Deputatova E.A., Kalikhman D.M., Polushkin A.V., Sadomtsev Yu.V. Digital stabilization of motion of precision controlled base platforms with inertial sensitive elements. II. Application of float angular velocity sensor and pendulum accelerometers // Journal of Computer and Systems Sciences International. 2011. Vol.50. No.2. P.309-324.
-
Садомцев Ю.В., Гривенев Д.А. Синтез цифрового регулятора для системы стабилизации скорости вращения вала генератора // Мехатроника, автоматизация, управление. 2011. №9. С.31-36.
-
Садомцев Ю.В., Гривенев Д.А. Полунатурное моделирование электрогидравлической системы регулирования скорости вращения вала генератора // Вестник СГТУ. 2011. №2(55). вып.1. С.167-171.
2015, 2014, 2013, 2012, 2011, Книги, Назад к началу раздела